
一、背景介紹
在3D打印過程中,重力有助于材料沉積,但也會在打印物體上增加恒定的向下力,這會導(dǎo)致打印物體變形或塌陷,尤其是在存在懸垂或薄特征的情況下。為了應(yīng)對這些挑戰(zhàn),已經(jīng)開發(fā)了支撐浴方法。支撐浴槽材料應(yīng)表現(xiàn)出賓漢塑料的性能:當(dāng)受到來自移動噴嘴的壓力時,它應(yīng)該流態(tài)化,允許打印材料擠出,并在消除應(yīng)力時迅速恢復(fù)到固態(tài),確保印刷油墨牢牢地保持在浴槽內(nèi)。此外,支撐槽還應(yīng)有助于交聯(lián),以避免油墨擴(kuò)散。因此,盡管支撐浴方法提供了許多好處,但其廣泛應(yīng)用現(xiàn)在受到高質(zhì)量支撐材料有限以及優(yōu)化切片和打印參數(shù)以匹配打印材料和支撐材料特性所需的努力和專業(yè)知識的阻礙。
與精密的3D結(jié)構(gòu)相比,平面結(jié)構(gòu)更容易直接制造成許多所需的形狀。因此,2D到3D 轉(zhuǎn)換策略將能夠從更容易獲得、更低維的結(jié)構(gòu)中設(shè)計3D結(jié)構(gòu)。以前的研究表明,空間變化的各向異性膨脹、壓縮屈曲、材料內(nèi)的內(nèi)應(yīng)力、形狀記憶材料和表面張力驅(qū)動的浮動可以觸發(fā)2D到3D轉(zhuǎn)換等。這些方法有助于以更低的成本和時間制造復(fù)雜的3D幾何形狀,并隨后導(dǎo)致了4D打印技術(shù)的發(fā)展,其中材料可以適應(yīng)不斷變化的環(huán)境。然而,目前的策略在形狀變形過程中只提供淺彎曲或滾動,因為它們依賴于材料的內(nèi)在特性來觸發(fā)變形,并且依賴于通常不適合細(xì)胞培養(yǎng)的具有響應(yīng)特性的專用材料。因此,需要替代方法來實現(xiàn)大變形、大規(guī)模創(chuàng)建復(fù)雜結(jié)構(gòu)以及使用各種生物相容性材料。
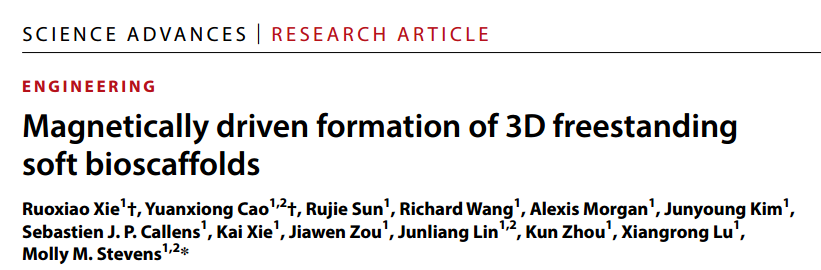
在這項研究中,提出了一種簡單而通用的3D生物制造使用遠(yuǎn)程控制的磁力將2D水凝膠前驅(qū)體轉(zhuǎn)化為復(fù)雜的3D形態(tài)(圖1和2A)。3D形態(tài)由轉(zhuǎn)化后的浮力、重力和磁力的組合支撐,因此無需物理支撐。在水凝膠中摻入生物相容性和熱響應(yīng)性明膠網(wǎng)絡(luò)作為犧牲支持,以便在聚合物交聯(lián)之前形成結(jié)構(gòu)。犧牲磁性墨水和重力墨水也被用來協(xié)助控制2D到3D的轉(zhuǎn)變。這些犧牲墨水隨后可以去除,留下完整的3D生物支架。此策略允許通過調(diào)整初始2D 形狀、溫度或磁點(diǎn)和重力點(diǎn)的空間分布等因素來實現(xiàn)可編程的形狀變形。使用這種形狀變形策略從多種生物相容性水凝膠設(shè)計3D生物支架,包括明膠、甲基丙烯酸化明膠 (GelMA)、甲基丙烯酸化透明質(zhì)酸(HAMA)、甲基丙烯酸酯葡聚糖(DexMA)和藻酸鹽。此外,在可交聯(lián)的塊狀水凝膠中構(gòu)建了3D分支血管通道,隨后表明這些3D通道是可灌注的并且可以內(nèi)皮化。還生成了用于制造3D軟致動器的彎曲的薄壁生物支架。總體而言,使用遠(yuǎn)程力支持脆弱的3D結(jié)構(gòu)的開發(fā)概念提供了一種獨(dú)特的形狀變形和3D制造策略,適用于各種材料系統(tǒng),從而為高效的3D生物制造開辟了新的可能性,使生物學(xué)、生物醫(yī)學(xué)工程、軟材料和軟機(jī)器人領(lǐng)域的研究人員受益。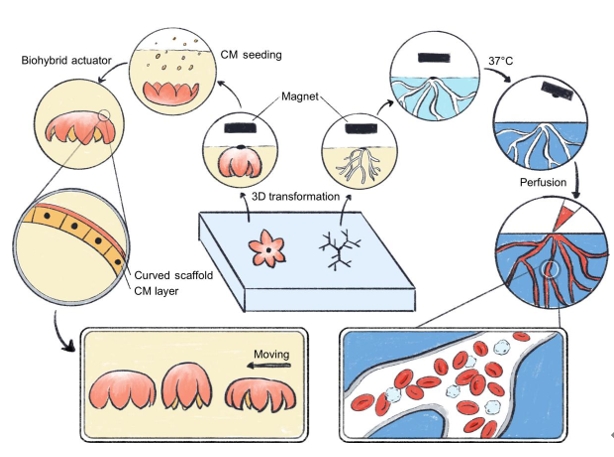
2.1 平面水凝膠支架的制造
扁平水凝膠支架可以使用3D生物打印機(jī) (SunP BioMaker 2) 制造。將20% (w/v) 明膠前體溶液加載到帶有金屬尖端的5 ml移液器中,并引入溫度為45°C的加熱打印機(jī)噴嘴中。 明膠生物墨水在涂有40% (w/v) Pluronic F-127溶液薄層的預(yù)冷打印床(4°C)上打印之前保持平衡。層高0.3 mm,打印速度12 mm/s,擠出速度1.6 mm3/s 被發(fā)現(xiàn)是最優(yōu)的。打印后,將磁性墨水和重力墨水添加到打印圖形的所需部分,使墨水在4°C打印床上融合5分鐘。
三、結(jié)果
3.1 磁力驅(qū)動的3D轉(zhuǎn)換
水凝膠支架從平面到3D的轉(zhuǎn)變是通過使用磁力的遠(yuǎn)程控制完成的。扁平水凝膠前驅(qū)體由三部分組成:主支架材料,它將形成最終的結(jié)構(gòu),以及犧牲磁性墨水和重力墨水,這將有助于3D轉(zhuǎn)換。所有組分都含有物理可交聯(lián)的明膠,可以暫時將油墨固定在適當(dāng)?shù)奈恢谩S裳趸F顆粒和明膠組成的磁性墨水被放置在平面水凝膠的中心;而由碳酸鈣和明膠組成的重力墨水位于末端(圖2A、i)。由于明膠的物理交聯(lián)特性,這些油墨在溫度降低時會在所需的沉積點(diǎn)迅速凝固。為了盡量減少對精密水凝膠支架的損壞,當(dāng)支架浸入水浴中時完成轉(zhuǎn)換,從而暴露在浮力下,浮力部分抵消了重力的影響,并防止整個結(jié)構(gòu)在形狀變形過程中過度下垂(圖2A、ii)。施加外部磁場使磁點(diǎn)暴露在向上的磁力下,抬起水凝膠支架,并在向下引力(圖2A、ii)。在本文中浮力、重力和磁力的結(jié)合保持了3D結(jié)構(gòu),直到材料完全交聯(lián)和凝固,從而消除了對固體材料的物理支撐的需求。
這種方法生成類似于3D血管網(wǎng)絡(luò)的復(fù)雜分支結(jié)構(gòu)的可行性。由于3D打印允許靈活設(shè)計和快速原型制作具有復(fù)雜特征的支架,因此基于擠壓的3D打印機(jī)制造了扁平水凝膠前驅(qū)體。在打印過程中,打印噴嘴被加熱到45°C,以確保材料順利擠出,同時打印床被冷卻到4°C,以確保擠出后材料快速固化。2D水凝膠前驅(qū)體是使用CAD (圖2B、i)中打印,然后使用基于擠壓的3D打印機(jī)打印(圖2B、ii)。浸入水浴后,施加外部磁場以觸發(fā)3D變換 (圖2B、iii)。3D網(wǎng)絡(luò)可以在幾秒鐘內(nèi)獲得,并且只要施加磁力,就可以在3D中持續(xù)存在(視頻1)。通過基于直接擠出的打印生成這些3D分支結(jié)構(gòu)將非常困難,因為這些精密結(jié)構(gòu)往往會在自身重量下塌陷。然而,通過使用磁驅(qū)動變形策略,打印的扁平水凝膠分支可以很容易地圖案化成復(fù)雜的3D形狀。因此,這種磁力驅(qū)動的轉(zhuǎn)換方法克服了當(dāng)前模塑和基于擠出打印的一些限制,可以創(chuàng)建精致的3D結(jié)構(gòu),同時保持靈活性和可擴(kuò)展性。
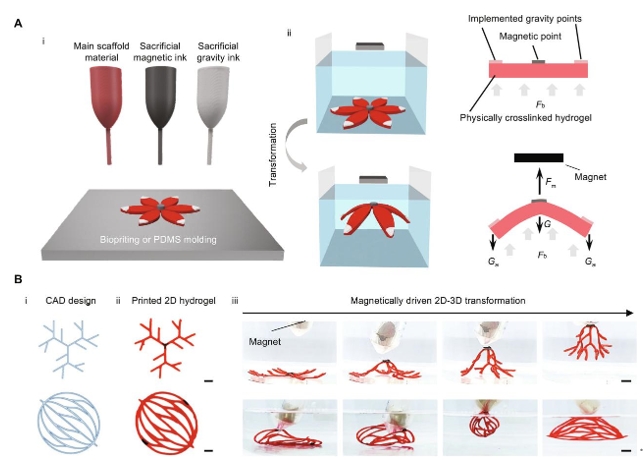
圖2. 基于磁驅(qū)動變換的制造策略概念。(A) 示意圖顯示(i)材料沉積成扁平水凝膠前驅(qū)體,(ii)在磁體應(yīng)用時浸沒轉(zhuǎn)化為3D形態(tài)。Fm表示施加在水凝膠上的磁力Fb表示浮力,G表示腳手架材料的重力,G一個表示額外實現(xiàn)的重力油墨的重力。(B)使用磁驅(qū)動變換策略對3D分支血管幾何形狀進(jìn)行4D打印。幾何設(shè)計在 AutoCAD(i)中生成,打印成扁平水凝膠前驅(qū)體(ii),然后使用磁鐵(iii)轉(zhuǎn)換為3D分支幾何。
3.2 對3D變換的多模態(tài)控制
用于暫時固化平面水凝膠前驅(qū)體的明膠是一種常用的溫度響應(yīng)材料,隨著溫度的升高,它會發(fā)生凝膠到溶膠的轉(zhuǎn)變(圖3A)。使用20% (w/v) 明膠檢查溫度對轉(zhuǎn)變的影響,并使用流變測量來評估材料對溫度的響應(yīng)。結(jié)果表明,20% (w/v)明膠的剪切模量從20°到30°C略有下降,但超過30°C后表現(xiàn)出顯著下降。在水凝膠前驅(qū)體的轉(zhuǎn)變過程中,從22°C到33°C的溫度掃描證實,剪切模量的降低增加了變形能力(圖3A、ii)。結(jié)果表明,支架在28°C以下表現(xiàn)出最小的變形,并且轉(zhuǎn)變的程度隨著溫度的增加而增加,直到支架在33°C時開始熔化。 此外,曲率半徑的測量揭示了水浴溫度與實現(xiàn)的形狀變形程度(圖3B)。當(dāng)溫度從22°升高到28°C時,轉(zhuǎn)換結(jié)構(gòu)的曲率半徑保持相對恒定,但在28°C以上的溫度下大幅下降(圖3B)。當(dāng)磁性油墨和重力油墨的數(shù)量保持不變時,30°C的水浴溫度與25°C相比,所有測試形狀的3D結(jié)構(gòu)渲染都非常出色。因此,控制溫度能夠調(diào)整水凝膠前驅(qū)體的模量,并隨后進(jìn)行形狀轉(zhuǎn)變。
圖3. 對磁驅(qū)動變換的多模態(tài)控制。(A) (i)顯示明膠從凝膠狀態(tài)到溶膠狀態(tài)的熱響應(yīng)的方案。(ii)花形水凝膠前驅(qū)體在不同溫度下的轉(zhuǎn)變,直到它在33°C下熔化。(B)隨著溫度的升高,將花形水凝膠前驅(qū)體置于水中時的曲率半徑(R)。在轉(zhuǎn)換的水凝膠支架的圖像下繪制一個藍(lán)色圓圈來測量半徑。(C)磁心對3D變換的影響。(i)磁中心面積增加的扁平水凝膠前驅(qū)體(白色虛線突出顯示每個水凝膠前驅(qū)體的磁心邊緣及其與中心和水凝膠前驅(qū)體邊緣的距離)和(ii)前驅(qū)體的相應(yīng)3D變換。(D)重力墨水對3D變換的影響。(i)具有兩個帶有重力墨水(白色尖端)的分支和兩個沒有的分支的扁平水凝膠前體。(ii)從兩個不同角度觀察時具有不同彎曲程度的轉(zhuǎn)化前驅(qū)體的示意圖和(iii)實驗圖像。(E)二維前驅(qū)體結(jié)構(gòu)設(shè)計的影響。(i)具有不同邊緣與中心分支寬度比(2:1、1:1和2:3) 的扁平水凝膠前驅(qū)體和相應(yīng)的3D轉(zhuǎn)換;(ii)前驅(qū)體的相應(yīng)3D變換。
磁性墨水的空間分布和重力墨水的體積分別負(fù)責(zé)驅(qū)動變形的磁力和重力,也可以進(jìn)行調(diào)整以提供形狀變形控制。磁點(diǎn)的位置會影響轉(zhuǎn)換結(jié)構(gòu)的形態(tài),因為它決定了支架的夾緊點(diǎn)(圖 3C)。當(dāng)磁點(diǎn)的距離更接近末端時,結(jié)構(gòu)的曲率半徑增加,表明變換減少。增加重力油墨的體積會增加重力提供的向下驅(qū)動力,從而導(dǎo)致更高程度的形狀變形(圖3D)。此外,2D結(jié)構(gòu)的原始設(shè)計會影響彎曲程度,因此創(chuàng)建了形狀相似但在彎曲點(diǎn)處連接程度不同的結(jié)構(gòu)(圖3E),發(fā)現(xiàn)在彎曲點(diǎn)處具有更多連接的結(jié)構(gòu)表現(xiàn)出較弱的彎曲。
由于磁力會觸發(fā)變形過程,因此預(yù)計更多磁體的實施會引入更復(fù)雜的磁力,從而可能觸發(fā)更通用的3D轉(zhuǎn)換。如圖4所示,通過使用兩個磁鐵固定2D水凝膠前驅(qū)體的兩端,然后扭曲結(jié)構(gòu),可以輕松地將兩條鏈編織成一個交織在一起的雙螺旋線。在這種結(jié)構(gòu)中,帶有紅色和藍(lán)色食用染料的明膠,用于代表兩種不同的材料,可以很容易地被其他材料取代,從而實現(xiàn)多材料支架。同樣,梯狀2D水凝膠前體可以轉(zhuǎn)化為類似DNA的雙螺旋結(jié)構(gòu)(圖4B)。細(xì)長的梯狀扁平水凝膠前驅(qū)體的進(jìn)一步扭曲可導(dǎo)致編織的管狀結(jié)構(gòu)(圖4C)。在兩個磁鐵的作用下,四個角上有四個磁點(diǎn)的扁平水凝膠網(wǎng)可以立即卷成3D管狀網(wǎng)(圖4、D和E)。因此,可以通過調(diào)節(jié)溫度、通過磁性和重力油墨的受控沉積來操縱相反的力,以及修改原始2D結(jié)構(gòu)的設(shè)計,從而微調(diào)2D水凝膠前驅(qū)體向3D形態(tài)的形狀變形。此外,磁點(diǎn)可以用作動態(tài)錨點(diǎn),從而實現(xiàn)對轉(zhuǎn)換的復(fù)雜控制。
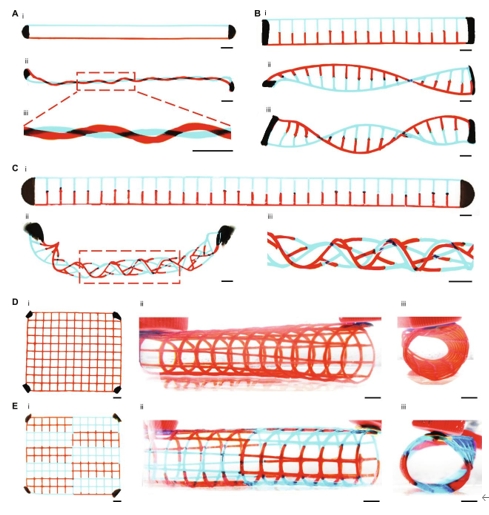
圖 4. 使用多磁體對3D結(jié)構(gòu)進(jìn)行圖案化。(A)在兩個磁鐵的幫助下,兩股(i)之前和(ii和iii)被扭曲成雙交織的螺旋線。(B)轉(zhuǎn)化前(i)和轉(zhuǎn)化后(ii和iii)的DNA樣雙螺旋結(jié)構(gòu)。變形的3D雙螺旋鏈,包含(ii)一個結(jié)和(iii)兩個結(jié)。(C)將(i)細(xì)長的梯狀扁平水凝膠前驅(qū)體扭曲成(ii和iii)編織管狀結(jié)構(gòu)。(D和E) 3D管狀網(wǎng)片由(D)均質(zhì)和(E)異質(zhì)水凝膠網(wǎng)壁組成。(i)包含四個磁性墨點(diǎn)的扁平水凝膠前驅(qū)體。(II和III)3D管狀網(wǎng)格的不同視圖。
3.3 變換的支架的犧牲模板以創(chuàng)建3D分支通道
3D血管分支網(wǎng)絡(luò)的開發(fā)可以改善組織工程結(jié)果。為了探索了磁轉(zhuǎn)化策略來創(chuàng)建具有3D可灌注分支通道的生物支架,選擇了20% (w/v)明膠來制造2D水凝膠前體,在3D轉(zhuǎn)化后,可以在細(xì)胞友好溫度下犧牲這些前體以產(chǎn)生通道。
因為GelMA預(yù)聚物可以在紫外線(UV)下輕松交聯(lián),并且具有適合組織工程應(yīng)用的生物相容性,所以用于交聯(lián)水凝膠浴。當(dāng)施加磁場時,2D 明膠前驅(qū)體轉(zhuǎn)化為3D形態(tài),(圖5A、i)作為浸沒的犧牲凝膠。然后在紫外線照射下交聯(lián)GelMA預(yù)聚物,將浸沒的犧牲凝膠固定在交聯(lián)的GelMA中。然后將由20% (w/v)明膠制成的浸沒犧牲凝膠,然后在37°C(圖5A、ii),導(dǎo)致生成可灌注支架(圖5A、iii)。還模擬了磁場分布(圖5B、i)。磁體的北極和南極平行于xz平面,中心線指向浸沒的犧牲凝膠。xz平面上的磁場強(qiáng)度隨著與磁體(圖5B).這一觀察結(jié)果表明,施加在浸沒的犧牲凝膠上的磁力可以通過改變支架和磁體之間的距離來調(diào)節(jié)。使用浮力Fb以及重力G和G一個保持恒定,浸沒的犧牲凝膠可以在調(diào)整施加的磁力(Fm)。通過實驗證實,遠(yuǎn)程應(yīng)用磁體會導(dǎo)致3D變換,如浸沒在GelMA浴中和紫外線照射下的浮動分支腳手架所示(圖5C)。然而,產(chǎn)生用于3D變換的磁場并不嚴(yán)格限于使用NdFeB磁體,它只產(chǎn)生梯度磁場。例如,以圓形或鞍形線圈對排列的電磁鐵可以產(chǎn)生空間均勻的磁場,以進(jìn)一步增強(qiáng)成型結(jié)構(gòu)的可控性。UV交聯(lián)后,將溫度升高至37°C,以溶解由20% (w/v) 明膠制成的浸沒犧牲凝膠,留下空心的分支通道。通過用有色染料注射通道來評估灌注質(zhì)量。如圖5D在圖像查看器中打開,觀察到染料溶液明顯滲透到支管的每一段,表明通道成功形成。通過改變扁平水凝膠的設(shè)計,還實現(xiàn)了具有不同尺寸和幾何形狀的空心分支通道。
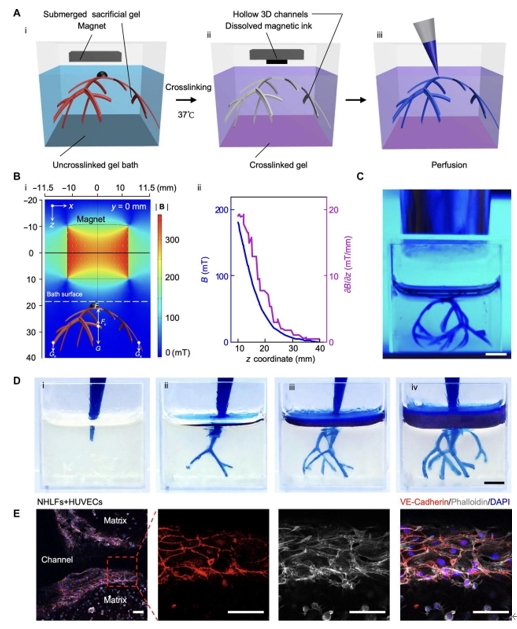
圖 5. 磁驅(qū)動轉(zhuǎn)化以創(chuàng)建具有3D分支維管通道的生物支架。(A)示意圖顯示了通過磁驅(qū)動轉(zhuǎn)化策略制造具有3D分支維管通道的生物支架的步驟。(i)當(dāng)施加磁體時,浸入未交聯(lián)凝膠浴中的扁平犧牲明膠前驅(qū)體轉(zhuǎn)化為3D幾何形狀。(ii)在紫外線下交聯(lián)凝膠浴后,將交聯(lián)支架置于37°C下,磁鐵仍放在頂部,以溶解明膠并去除溶解的磁性墨水。(iii)顯示生成的支架灌注的方案。(B)磁場分布分析。(i)施加磁體引起的磁場分布的有限元分析。(ii)沿z坐標(biāo)的磁場分布。(C)犧牲前驅(qū)體轉(zhuǎn)化為3D形態(tài)后支架的UV交聯(lián)。(D)從(i)到(iv)演示的藍(lán)色染料的支架灌注。(E)纖維蛋白支架中VE-鈣粘蛋白(紅色)、鬼筆環(huán)肽(灰色)和4',6-二脒基-2-苯基吲哚(DAPI)(藍(lán)色)的免疫染色,其中HUVEC襯在通道壁上,NHLF在纖維蛋白基質(zhì)內(nèi)。
兩種基于蛋白質(zhì)的關(guān)鍵天然水凝膠廣泛用于組織工程。膠原蛋白預(yù)聚物被用作沐浴材料。膠原蛋白浴在室溫下發(fā)生溶膠-凝膠轉(zhuǎn)變,因此隨著時間的推移變得不透明。在37°C下孵育后,去除嵌入膠原蛋白浴中的浸沒犧牲凝膠,形成空心通道。使用相同的策略,我們還在纖維蛋白中創(chuàng)建了3D分支通道并確認(rèn)了它們的可灌注性。
使用了人臍靜脈內(nèi)皮細(xì)胞 (HUVECs),因為它們通常用于體外血管形成。首先評估了暴露于碳酸鈣和氧化鐵顆粒時的細(xì)胞活力。將細(xì)胞暴露在一定劑量的氧化鐵顆粒中,就像它們在密度為1000萬/毫升的磁性墨水或重力墨水中培養(yǎng)一樣。結(jié)果表明,碳酸鈣顆粒在2小時暴露或長期暴露組中都不會降低細(xì)胞活力。然而,氧化鐵顆粒顯著降低了長期暴露組的細(xì)胞活力,但2小時暴露組沒有降低細(xì)胞活力。當(dāng)明膠溶解時,氧化鐵從明膠中釋放出來,并被磁鐵吸引。這種方法可確保細(xì)胞在相當(dāng)長的時間內(nèi)不會暴露在氧化鐵顆粒中。為了評估任何殘留顆粒對細(xì)胞活力的潛在影響,將細(xì)胞暴露于不同劑量的氧化鐵顆粒中,并在7天的孵育期內(nèi)監(jiān)測細(xì)胞活力。結(jié)果表明,如果細(xì)胞在磁性墨水中以1000萬/ml的密度培養(yǎng),劑量減少到全劑量的10% (1/10)以下,氧化鐵顆粒不會對細(xì)胞活力產(chǎn)生顯著影響。鑒于(i)細(xì)胞不直接在磁性墨水中培養(yǎng),并且(ii)磁性墨水僅占整個支架的一小部分,并且在犧牲后可以很容易地被磁鐵去除,因此磁性顆粒的利用不會對摻入生物支架的細(xì)胞產(chǎn)生不利影響。
為了評估具有分支通道的3D支架促進(jìn)組織工程應(yīng)用細(xì)胞活性的能力,在GelMA生物支架中培養(yǎng)正常人肺成纖維細(xì)胞(NHLF)和HUVEC。培養(yǎng)4天后,兩種細(xì)胞類型在支架內(nèi)均表現(xiàn)出良好的活力。培養(yǎng)14天后,通道周圍的細(xì)胞保持良好的活力并建立連接。相比之下,距離通道較遠(yuǎn)且位于凝膠內(nèi)的細(xì)胞活性隨著時間的推移而降低,并最終發(fā)生細(xì)胞死亡。這些結(jié)果表明,模板化通道可用于促進(jìn)生物支架中的營養(yǎng)輸送和細(xì)胞存活。值得注意的是,在中空通道周圍觀察到大量存在CD31,CD31是血管形成的標(biāo)志物。這一觀察結(jié)果證實,磁驅(qū)動轉(zhuǎn)化產(chǎn)生的分支通道可以內(nèi)皮化并用于設(shè)計血管結(jié)構(gòu)。
將內(nèi)皮細(xì)胞摻入犧牲凝膠中,將成纖維細(xì)胞摻入纖維蛋白浴中。在纖維蛋白浴的交聯(lián)過程中,內(nèi)皮細(xì)胞保留在犧牲凝膠內(nèi),而成纖維細(xì)胞位于纖維蛋白基質(zhì)內(nèi)。在室溫下孵育30分鐘后,將纖維蛋白浸入培養(yǎng)基中并放入培養(yǎng)箱中。隨著犧牲凝膠溶解,內(nèi)皮細(xì)胞附著在纖維蛋白支架壁上,而成纖維細(xì)胞嵌入3D纖維蛋白基質(zhì)中。孵育7天后,用VE-鈣粘蛋白和鬼筆環(huán)肽固定并染色纖維蛋白支架。染色進(jìn)一步驗證了內(nèi)皮細(xì)胞在通道內(nèi)生長,成纖維細(xì)胞分布在基質(zhì)中(圖5E)。清晰的VE-鈣粘蛋白信號表明內(nèi)皮細(xì)胞之間形成緊密連接,內(nèi)皮細(xì)胞屏障成功形成。
3.4 3D轉(zhuǎn)化的生物支架可以交聯(lián)成獨(dú)立結(jié)構(gòu)
將其他可交聯(lián)水凝膠與明膠結(jié)合使用,以創(chuàng)建3D變形結(jié)構(gòu)。這種方法允許3D轉(zhuǎn)化的水凝膠交聯(lián)而不是犧牲。平面設(shè)計,無論是模制的還是打印的,都可以使用與以前相同的磁觸發(fā)2D到3D轉(zhuǎn)換在水中轉(zhuǎn)換為3D結(jié)構(gòu)。如圖6A所示,一旦演變成3D配置,結(jié)構(gòu)可以通過紫外線或通過在水浴中添加交聯(lián)劑來交聯(lián),同時磁鐵可以穩(wěn)定結(jié)構(gòu)。
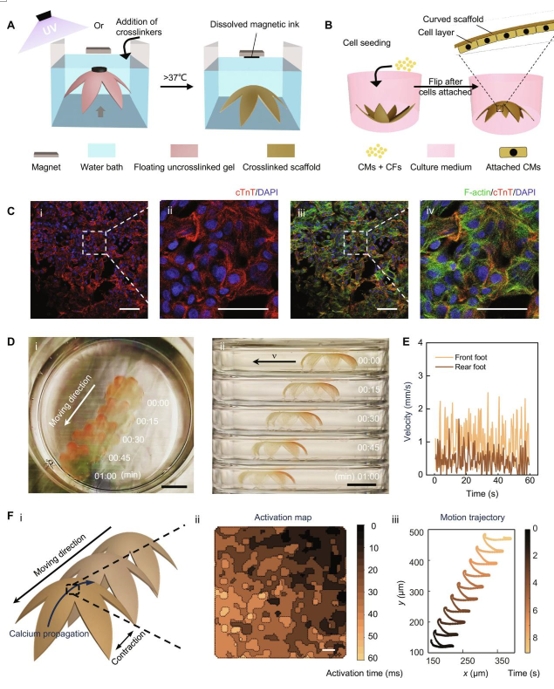
圖 6. 3D薄生物支架的磁驅(qū)動轉(zhuǎn)化能夠產(chǎn)生具有行走運(yùn)動的基于水凝膠的生物混合致動器。(A)方案說明了創(chuàng)建花形的基于3D薄膜的生物支架的過程。最初,扁平的可交聯(lián)水凝膠前驅(qū)體轉(zhuǎn)化為3D形態(tài),然后在其上方放置磁鐵時交聯(lián)。在37°C下孵育后,交聯(lián)支架將從磁體中釋放出來,而明膠會溶解,同時從支架中釋放磁性墨水。(B)說明生物支架上的細(xì)胞接種和層形成的方案。(C)在3D薄生物支架表面培養(yǎng)的心肌細(xì)胞的免疫染色。cTnT(紅色)、DAPI(藍(lán)色)和F-肌動蛋白(綠色)。(I和III)低放大倍率。比例尺,50 μm。(II和IV)高放大倍率。比例尺,25μm。(D) (i)行走生物雜交致動器的俯視圖和(ii)側(cè)視圖延時照片(收集 1 分鐘)。比例尺,1厘米。(E)前腳和后腳隨時間變化的瞬時速度。(F) (i)支架收縮、移動和鈣傳播方向示意圖;(ii) 支架中心心肌細(xì)胞隨時間的鈣傳播映射(比例尺:500 μm);(iii)腳手架運(yùn)動分析。
交聯(lián)后,移除磁體后保持3D形態(tài),從而產(chǎn)生獨(dú)立的3D生物支架(圖6A )。這種形狀變形和交聯(lián)方法可以應(yīng)用于各種水凝膠系統(tǒng),例如 GelMA、DexMA、HAMA和藻酸鹽,所有這些系統(tǒng)在交聯(lián)后都顯示出良好的3D形態(tài)。然而,當(dāng)使用UV在水下交聯(lián)材料時,由于UV強(qiáng)度的變化,交聯(lián)效率會受到材料在水下的深度的影響。為了研究這種依賴性,我們檢查了GelMA的楊氏模量在15 mm深的浴溶液(深浴)和5 mm深的浴溶液中被紫外線交聯(lián)多個持續(xù)時間,后者只有一個薄層覆蓋材料(淺浴)。如圖 1 所示。在相同的交聯(lián)持續(xù)時間下,深浴組和淺浴組之間沒有顯著差異。交聯(lián)5或10 min的組的楊氏模量顯著低于交聯(lián)15或20 min的組。因此,本研究中使用的浴槽深度對交聯(lián)效率沒有顯著影響;相反,交聯(lián)時間是主導(dǎo)因素。然而,在15分鐘組和20分鐘組之間沒有觀察到顯著差異,表明在應(yīng)用條件下,當(dāng)GelMA暴露在紫外線下超過15分鐘時,GelMA已完全固化。因此,當(dāng)需要相當(dāng)深的浴槽來制作大型支架時,材料可以在閾值以上的時間內(nèi)交聯(lián),以確保整個支架的材料特性一致。
3.5 產(chǎn)生具有行走運(yùn)動的基于水凝膠的生物混合致動器
接下來探索了3D薄壁生物支架在形成生物雜交致動器方面的功能效用。結(jié)合平面聚合物或水凝膠支架和心臟或肌肉細(xì)胞進(jìn)行運(yùn)動的生物混合致動器已被廣泛研究。這些致動器成功地復(fù)制了魚、鰩魚或水母的游泳運(yùn)動,并有可能實現(xiàn)模擬心臟功能的液體泵送系統(tǒng)。天然心臟組織具有有助于泵送的曲率,但當(dāng)前生物混合致動器系統(tǒng)中使用的平面支架不包括此功能。此外,雖然已經(jīng)研究了由心肌細(xì)胞驅(qū)動的具有行走運(yùn)動的生物混合致動器,但可生物降解的軟水凝膠的使用一直很少見,主要是因為難以將這些材料設(shè)計成3D薄壁支架。最近的一項研究使用應(yīng)力誘導(dǎo)的變形來實現(xiàn)具有生理曲率的3D打印心臟貼片,盡管由于水凝膠支架的高機(jī)械阻力而無法實現(xiàn)宏觀收縮。
為了應(yīng)對這一挑戰(zhàn),探索獨(dú)立式3D薄壁生物支架是否可以促進(jìn)具有所需曲率和宏觀收縮的生物混合致動器的開發(fā),以及這種設(shè)計是否可以產(chǎn)生能夠行走的生物混合機(jī)器人。選擇GelMA作為支架材料是因為它能夠摻入在先前文獻(xiàn)中用于觸發(fā)軟生物雜交致動器變形的心肌細(xì)胞。使用花結(jié)構(gòu)是因為它可以為細(xì)胞附著提供大表面,并且可以在水中自由站立以允許潛在的行走運(yùn)動。
為了準(zhǔn)備3D生物雜交致動器,準(zhǔn)備了一種由明膠和GelMA組成的扁平水凝膠前體。將結(jié)構(gòu)轉(zhuǎn)化為3D構(gòu)型后,對GelMA進(jìn)行UV交聯(lián)。支架的厚度最小化以實現(xiàn)細(xì)胞觸發(fā)的運(yùn)動。支架的厚度約為300 μm。厚度的進(jìn)一步減少可能會給材料部署帶來挑戰(zhàn),從而影響支架的可重復(fù)性。制造完成后,將支架在37°C下孵育過夜以去除明膠,從而得到最終的獨(dú)立式3D薄壁生物支架(圖6A)。5% (w/v) GelMA和10% (w/v) GelMA均進(jìn)行了支架制造測試,后者在去除明膠后表現(xiàn)出更好的形狀保持性和可重復(fù)性。因此,選擇了由10% (w/v) GelMA制成的支架用于隨后的細(xì)胞接種。將具有GCaMP指示劑衍生心肌細(xì)胞 (GCaMP hiPSC-CM)的人誘導(dǎo)多能干細(xì)胞(hiPSC)接種到生物支架表面,以生成生物混合3D致動器(圖6B)。此外,添加了10%的心臟成纖維細(xì)胞以促進(jìn)更好的心肌細(xì)胞附著和功能。
通過cTnT和F-肌動蛋白染色驗證支架上的細(xì)胞(圖6C),結(jié)果顯示支架被心肌細(xì)胞很好地覆蓋,細(xì)胞生長各向同性,細(xì)胞體或肌節(jié)沒有對齊。即使沒有引導(dǎo)細(xì)胞對齊,由于水凝膠材料薄層的低彎曲阻力,細(xì)胞層也足夠堅固,可以觸發(fā)整個支架的顯著反復(fù)收縮和松弛(視頻2)。為了實現(xiàn)行走運(yùn)動,將生物混合 3D 致動器的彎曲面朝下。隨時間的變化是從頂部和側(cè)面記錄的。從錄制的視頻(視頻S2和S3)中,可以觀察到由心肌細(xì)胞的自發(fā)跳動觸發(fā)的生物混合3D致動器的運(yùn)動。圖6D還顯示了隨時間移動的生物混合3D致動器的圖像。后腳和前腳之間的不同收縮力,由兩只腳的不同瞬時速度表示(圖6E),可能是將支架向前移動的主要驅(qū)動力。進(jìn)行iPSC-CMs的鈣成像以探索細(xì)胞水平的驅(qū)動。由于心肌細(xì)胞來源于GCaMP iPSC,因此鈣成像可以直接通過熒光成像進(jìn)行。在同一個鈣成像視頻中還跟蹤了支架的運(yùn)動。結(jié)果表明,鈣的傳播方向(圖6F、ii)與花形軟致動器的運(yùn)動(圖6F、iii)一致,表明iPSC-CMs的收縮導(dǎo)致軟致動器的變形,產(chǎn)生類似于行走運(yùn)動的有節(jié)奏的向前推力。因此,使用磁觸發(fā)轉(zhuǎn)化策略,成功地設(shè)計了一個僅由生物相容性水凝膠和細(xì)胞組成的3D步行致動器。這些進(jìn)步有可能成為開發(fā)與生命系統(tǒng)交互的植入式工程組織和軟機(jī)器人的使能平臺。
四、討論
本文展示了一種簡單而通用的生物制造策略,可以有效地將打印和模制的扁平軟水凝膠前體轉(zhuǎn)化為復(fù)雜的3D結(jié)構(gòu)。與以前報道的2D到3D轉(zhuǎn)換策略不同,此方法不依賴于材料的內(nèi)在特性。相反,響應(yīng)特性來自犧牲油墨和磁場的遠(yuǎn)程應(yīng)用,使其與更廣泛的材料系統(tǒng)兼容,并克服了對精確預(yù)定材料設(shè)計的要求。還通過外力和隨溫度調(diào)整形狀變形,可以更輕松地控制3D變形。此外,施加在支架上的遠(yuǎn)程磁力和重力消除了制造過程中對物理支撐的需求,從而可以輕松制造薄而軟的生物支架。此外,這些力作用在相反的方向上,從而實現(xiàn)實質(zhì)性的形狀變形和不受高度限制的受控彎曲。這一優(yōu)勢能夠生成分支3D血管結(jié)構(gòu),這是以前報道的2D到3D轉(zhuǎn)換方法無法實現(xiàn)的。因此,在3D結(jié)構(gòu)和材料多樣性方面擴(kuò)展了3D生物制造中形狀變形的可能性。使用這種方法,實現(xiàn)了3D分支網(wǎng)絡(luò)和由軟水凝膠組成的薄膜拱結(jié)構(gòu)。所得結(jié)構(gòu)已用作犧牲模板來復(fù)制分支血管系統(tǒng)的建筑模式,或用作生物支架,支持制造具有心肌細(xì)胞觸發(fā)的行走運(yùn)動的生物混合軟致動器。
然而,由于明膠網(wǎng)絡(luò)對于幫助支持系統(tǒng)中水凝膠前體的形狀至關(guān)重要,因此該策略目前只能應(yīng)用于水性環(huán)境中的材料。為了進(jìn)一步擴(kuò)大適用于2D到3D轉(zhuǎn)換策略的材料范圍,未來的研究可能涉及設(shè)計與油基聚合物兼容的替代犧牲材料。
總體而言,利用遠(yuǎn)程控制力來實現(xiàn)對材料形狀變形的精確控制,并為使用軟生物材料設(shè)計復(fù)雜的3D結(jié)構(gòu)提供了新的機(jī)會。這種方法有可能促進(jìn)工程組織、軟機(jī)器人技術(shù)以及3D和4D打印的未來發(fā)展。
五、參考文獻(xiàn)
Ruoxiao Xie et al. ,Magnetically driven formation of 3D freestanding soft bioscaffolds.Sci. Adv.10,eadl1549(2024).DOI:10.1126/sciadv.adl1549。